Одним из главных условий надёжной работы ЭЭС является её устойчивость, т.е. способность ЭЭС восстанавливать исходный или близкий к исходному установившийся режим после его нарушения и после соответствующего переходного режима. Иными словами, устойчивость - это способность ЭЭС сохранять синхронную работу.
Различают два вида неустойчивости:
- 1. «Самораскачивание», которое проявляется в нарастающих колебаниях параметров режима, так называемая колебательная неустойчивость.
- 2. «Сползание» - апериодический уход от положения равновесия, так называемая апериодическая неустойчивость.
Причины раскачивания (колебательной неустойчивости): Э4
- · Неправильная настройка АРВ СГ, когда регулирование возбуждения вместо демпфирования раскачивает режим.
- · Неудачный выбор параметров системы регулирования мощности турбин.
- · Работа генераторов на сеть с большой емкостью: линии с высокой степенью УПК, протяженные линии в режимах холостого хода или малых нагрузок.
Основной причиной апериодической неустойчивости является перегрузка электропередач.
Различают следующие три вида устойчивости:
- · Статическая устойчивость (СУ) - это способность ЭЭС сохранять синхронную работу после малого возмущения режима.
- · Динамическая устойчивость (ДУ) - это способность ЭЭС сохранять синхронную работу после большого возмущения режима. В тех случаях, как правило, когда возникает небаланс активных мощностей на валу хотя бы одного из генераторов.
- · Результирующая устойчивость (РУ) - это способность ЭЭС восстанавливать синхронную работу после кратковременного её нарушения (после кратковременного, допустимого по условиям эксплуатации асинхронного режима).
Исследование статической устойчивости имеет обычно целью определение параметров предельного по устойчивости режима. Зная эти параметры и параметры исходного (планируемого) режима, легко можно определить запас статической устойчивости.
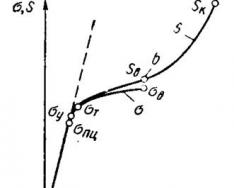
Характер нарушения апериодической СУ и ее обеспечения определяется с помощью характеристик генератора и турбины (рис. В.3).
д -Угол нагрузки
Рис.
Как отмечалось, устойчивы только те режимы, рабочие точки которых находятся на восходящей ветви характеристики генератора (точка «а»).
Наоборот, в точке «в» работа невозможна, режим неустойчив. Например, при малом увеличении угла д на валу ротора появляется ускоряющий небаланс. Под его действием ротор еще больше ускоряется, угол продолжает увеличиваться и т.д., процесс необратим. При уменьшении угла также возвращение в исходную точку не происходит, а угол продолжает уменьшаться.
Таким образом, падающая ветвь характеристики генератора является зоной апериодической неустойчивости.
Действительно, при этом малое увеличение угла Дд (точка а1) приведет к увеличению тормозящей электрической мощности. На валу генератора появляется тормозящий небаланс мощности. Под его действием скорость вращения уменьшится и угол уменьшится (т.е. исходный режим восстановится). Аналогично происходит при уменьшении угла.

В установившемся режиме работы генератора механический момент M 1 на валу первичного двигателя (паровая или гидротурбина) равен электромагнитному моменту M, развиваемому генератором (рис. 17.3). Момент М 1 не зависит от угла поворота ротора и поэтому изображен горизонтальной прямой, которая пересекается с характеристикой M = f(и) в точках 1 и 2 .
В этих точках М 1 = М. Это необходимое условие для установившегося движения, но не всегда для устойчивого. Устойчивая работа будет только в точке 1 потому, что если ротор по какой-то причине повернется на угол больший чем и 1 и станет и 1 + Ди (точка 1 "), то электромагнитный момент возрастает до значения M+ДM, что будет больше чем момент у первичного двигателя (M+ДM)> M 1 , это заставит ротор затормозиться и вернуться в положение 1 с углом и 1 . Если при работе в точке 1 угол и в результате случайного возмущения уменьшится, то при прекращении действия этого возмущения генератор также вернется в режим работы в точку 1 .
В точке 2 работа будет неустойчивой. Если при работе в точке 2 угол и увеличится на Ди (точка 2 ”), то момент генератора уменьшится и станет меньше момента первичного двигателя (M-ДM) < M 1 , ротор будет ускоряться, угол и еще больше возрастет и т. д. В результате генератор выйдет из синхронизма, перейдет в двигательный режим и т. д. Если же при работе в точке 2 угол и уменьшится, то вследствие нарушения баланса моментов будет уменьшаться и далее, пока этот баланс M = M 1 не восстановится в точке 1 .
Таким образом, работа неявнополюсного генератора устойчива в области 0 < и < 90° и неустойчива в области 90 < и < 180°. Поэтому угол
и = 90° является критическим углом, и кр = ±90°.
Расчеты устойчивости ЭЭС имеют следующие основные цели:
- 1. Определение уровня устойчивости ЭЭС и сопоставление его с желаемым. При этом выявляется та область исходных режимов и те повреждения, при которых требуется противоаварийное управление.
- 2. Обеспечить и повысить устойчивость ЭЭС можно путём воздействия на переходные режимы за счёт так называемых управляющих воздействий (УВ), исходящих от устройств автоматики: 1.релейной защиты, автоматического повторного включения (АПВ), АВР, 2.противоаварийной автоматики (ПАА) или 3.персонала.
Системы релейной защиты и АПВ обеспечивают простейшие УВ: отключение повреждённых элементов системы, различные виды повторных включений. Однако в современных сложных ЭЭС лишь эти простейшие УВ часто не обеспечивают устойчивость, поэтому приходится использовать более сложные УВ, обеспечиваемые системой ПАА, такие, как отключение генераторов, отключение нагрузки и другие, которые будут рассмотрены далее.
Характер протекания переходных режимов непосредственно влияет на условия работы ЭЭС, определяя надёжность её работы, устойчивость и живучесть. При отсутствии надлежащего управления или неправильном управлении переходными режимами в ЭЭС развивается системная авария, являющаяся самой тяжёлой, поскольку приводит к нарушению электроснабжения большого числа потребителей, погашению электростанций.
ЧАСТЬ 2
УСТОЙЧИВОСТЬ ЭЛЕКТРИЧЕСКИХ СИСТЕМ
Глава 9
СТАТИЧЕСКАЯ УСТОЙЧИВОСТЬ
9.1. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ УСТОЙЧИВОСТИ
Деление режимов электрической системы на установившиеся и переходные условно. В установившемся режиме реальной системы I его параметры постоянно меняются, что связано со следующими факторами:
- изменением нагрузки и реакцией на эти изменения регули рующих устройств;
- нормальными эксплуатационными изменениями схемы ком мутации системы;
- включением и отключением отдельных генераторов или из менением их мощности.
Таким образом, в установившемся режиме системы всегда есть малые возмущения параметров ее режима, при которых она долж на быть устойчива.
Статическая устойчивость - это способность системы вос станавливать исходный (или близкий к исходному) режим после малого его возмущения.
Аварийные режимы в электрической системе возникают при КЗ, аварийных отключениях нагруженных агрегатов или линий и т. п. Под действием больших возмущений возникают резкие изменения режима.
Динамическая устойчивость - это способность системы возвращаться в исходное (или близкое к нему) состояние после боль шого возмущения. Когда после большого возмущения синхронный режим системы нарушается, а затем после допустимого перерыва восстанавливается, то говорят о результирующей устойчивости системы. Результирующую устойчивость иногда считают разно видностью динамической устойчивости, разделяя синхронную динамическую устойчивость и результирующую динамическую устойчивость.
Исходя из определения статической устойчивости системы можно заключить, что существует такой режим, при котором очень малое увеличение нагрузок вызывает нарушение его устойчивости. Такой режим называют предельным, а нагрузки системы - максимальными или предельными нагрузками по услови ям статической устойчивости.
Ограничение нагрузок может быть вызвано и другими обстоятельствами, например нагревом элементов электрической системы (генераторов, трансформаторов и т. п.). В этом случае говорят о предельных нагрузках по условиям нагрева и устанавливают также максимальное время существования режима.
Возможны ограничения нагрузок по уровням напряжения в уз лах, напряжению короны и т. п.
Пропускной способностью элемента системы называют наи большую мощность, которую можно передать через этот элемент с учетом всех ограничивающих факторов (нагрева, устойчивости, напряжения в узлах и т. п.). Иногда пропускную способность опре деляют по одному фактору и говорят, например, о пропускной способности по нагреву.
Понятие о пропускной способности справедливо и для дина мической устойчивости. В этом случае говорят о пределе передаваемой мощности по условиям динамической устойчивости при КЗ в какой-либо точке, отключении линии и т. п. Задачи, возникающие при анализе устойчивости, весьма слож ны и объемны. Поэтому для понимания физической сущности рас сматриваемых явлений прибегают к упрощению решаемых задач. Иногда приходится отказываться от математической строгости решения, отбрасывать второстепенные факторы. При этом не отражаются детали, но получается достаточно полная картина явления. Один из приемов, упрощающих решение, - рассмотрение электрической системы как позиционной.
Позиционная система - такая система, в которой параметры режима зависят от текущего состояния, взаимного положения, например, роторов генераторов и двигателей независимо от того, как было достигнуто это состояние. При этом реальные динамические характеристики элементов системы заменяются статическими.
Статические характеристики - это связи параметров режима системы, представленные аналитически или графически и не зави сящие от времени. Эти связи выявляются в основном в установив шемся режиме системы.
Динамические характеристики - это связи параметров, полу ченных при условии, что они зависят от времени. В этом случае отражается влияние первых, а возможно, и более высоких произ водных рассматриваемых параметров.
Для описания позиционной системы достаточно статических характеристик. Динамические характеристики позволяют исследовать электрическую систему как динамическую.
Динамический переход от одного режима к другому подвергается качественной оценке. При этом оцениваются характер проте кания переходного процесса (быстрый, медленный, монотонный, апериодический) и характер нового установившегося режима. Счи тается, что качество переходного процесса хорошее, если наблю даются быстрое его затухание, апериодичность или монотонность. Режим, наступающий после переходного процесса, должен иметь достаточный запас устойчивости, который проверяется из менением какого-либо параметра. Наибольшая величина отклонения, при которой система еще сохраняет устойчивость, определяет запас устойчивости, выражаемый коэффициентом запаса. Например, запас по напряжению вычисляется по формуле
запас по мощности - по формуле
![]()
Новый установившийся режим может быть оценен с помощью критериев качества, установленных ГОСТ.
9.2. ДОПУЩЕНИЯ, ПРИНИМАЕМЫЕ ПРИ АНАЛИЗЕ УСТОЙЧИВОСТИ
В дополнение к принятым при анализе электромагнитных переходных процессов допущениям принимаются еще несколько, упрощающих оценку устойчивости и обеспечивающих достаточ ную для инженерных расчетов точность.
1. Предполагается, что скорость вращения роторов синхронных машин при протекании электромеханических переходных процессов изменяется в небольших пределах (2...3 %) синхронной скорости.
2. Считается, что напряжение и токи статора и ротора генера тора изменяются мгновенно.
3. Нелинейность параметров системы обычно не учитывается. Нелинейность же параметров режима, напротив, учитывается. Ког да от такого учета отказываются, это специально оговаривают, система при этом называется линеаризованной.
4. Перейти от одного режима электрической системы к другому можно, изменив собственные и взаимные сопротивления схемы, а также ЭДС генераторов и двигателей.
5.
Исследование динамической устойчивости при несимметричных возмущениях производится в схеме прямой последова
тельности. Считается, что движение роторов генераторов и
двигателей обусловлено моментами, создаваемыми токами прямой
последовательности.
9.3. ЗАДАЧИ РАСЧЕТА УСТОЙЧИВОСТИ ЭЛЕКТРИЧЕСКИХ СИСТЕМ
При анализе статической устойчивости возникает ряд задач, которые решаются в проектных и эксплуатационных организациях. К таким задачам относятся:
1. Расчет параметров предельных режимов (предельной пере даваемой мощности по линиям энергосистемы, критического напряжения узловых точек системы, питающих нагрузку, и т. д).
2. Определение значений коэффициентов запаса. Вместе с при веденными в разд. 9.1 коэффициентами запаса по напряжению и мощности могут вычисляться коэффициенты запаса по настроеч ным параметрам АРВ:
font-size:11.5pt;color:black;letter-spacing: -.4pt">где К max и
Kmin - максимальное и минимальное значения настроеч ных параметров, соответствующих границе области статической устойчивости.3. Выбор мероприятий по повышению статической устойчиво сти энергосистем или обеспечению заданной пропускной способ ности передачи.
4. Разработка требований, направленных на улучшение устой чивости систем. Выбирается настройка АРВ, обеспечивающая требуемую точность поддержания напряжения.
Решение перечисленных задач проводится с учетом возможности возникновения самораскачивания системы.
Задачи анализа динамической устойчивости связаны с перехо дом системы от одного установившегося режима к другому. Это следующие задачи:
а) расчет параметров динамического перехода при эксплуата ционном или аварийном отключениях нагруженных элементов электрической системы.
б) определение параметров динамических переходов при ко ротких замыканиях в системе с учетом различных факторов:
- возможного перехода одного несимметричного КЗ в другое (например, однофазного в двухфазное);
Работы автоматического повторного включения элемента, от ключившегося после КЗ, и т. д. Результатами расчета динамической устойчивости являются: - предельное время отключения расчетного вида КЗ в наиболее опасных точках системы;
- паузы систем АПВ, установленных на различных элементах электрической системы;
- параметры систем автоматического ввода резерва (АВР).
Расчеты ведутся, как правило, с учетом нелинейностей и
существенных динамических характеристик.
9.4. СТАТИЧЕСКАЯ УСТОЙЧИВОСТЬ ПРОСТЕЙШЕЙ СИСТЕМЫ
Под простейшей системой понимается такая, в которой одиночная электростанция (эквивалентный генератор) связана с ши нами (системой) неизменного напряжения трансформаторами и линиями, по которым передается мощность от станции в систему (рис. 9.1, а). Принимается, что суммарная мощность электрических станций системы во много раз превышает мощность рассматри ваемой станции. Это позволяет считать напряжение на шинах сис темы неизменным (U = const ) при любых режимах ее работы.
На рис. 9.1, б представлены два основных агрегата тепловой электрической станции: турбина и генератор. Ротор турбины приводится во вращение паром, подводимым к турбине от котла элек тростанции. Вращающий момент турбины зависит от количества
Энергоносителя. Для паровой турбины - это пар, для гидротур бин - вода. В нормальном режиме эксплуатации основные параметры энергоносителя - температура и давление пара - стабильны, поэтому вращающий момент турбины постоянен. Мощность, вы даваемая генератором в систему, определяется несколькими пара метрами, влияние которых зависит от характеристики мощности генератора.
font-size:9.0pt;color:black;letter-spacing: -.05pt">Рис. 9.1. Оценка статической устойчивости простейшей системы: а - принципи альная схема системы; б - блок турбина - генератор; в - векторная диаграмма генератора; г - схема замещения системы; д - механический аналог блока
турбина - генератор
Для получения характеристики мощности построена векторная диаграмма электропередачи (рис. 9.1, в). Она повторяет диаграмму, изображенную на рис. 2.10, а однако в ней полный вектор тока заменен на его действительную и мнимую составляющие, а сопро тивление xd - на сопротивление xdΣ получаемое из схемы замеще ния системы, представленной на рис. 9.1, г:
xdΣ .= Xd + xT 1 + xL 2 / xL 2 + xT 2
Из векторной диаграммы следует, что
Ia xdΣ = Е sinδ ,
где Iа - активная составляющая тока; δ - угол сдвига ЭДС Е от носительно напряжения U . Умножая обе части равенства на U / xdΣ , получим
![]()
(9.1)
где Р - активная мощность, выдаваемая генератором (принята в относительных единицах).
Зависимость (9.1) имеет синусоидальный характер и называет ся характеристикой мощности генератора. При постоян ных ЭДС Е генератора и напряжении U угол поворота генератора определяется только его активной мощностью, которая, в свою очередь, определяется мощностью турбины. Наглядной иллюстрацией зависимости мощности (момента) турбины от угла сдвига 8 является система двух дисков, соединенных пружинами (рис. 9.1, д). В режиме XX (без учета трения) приводящий (поле ротора, свя занного с турбиной) и приводимый (поле статора) диски не обра зуют угла сдвига относительно друг друга. При появлении тормозящего момента (реакция статора) угол сдвига между диска ми будет тем больше, чем больше тормозящий момент. Очевидно, что при увеличении тормозящего момента может произойти проворот одного диска относительно другого, что является нарушением устойчивости рассматриваемой системы.
Мощность турбины зависит от количества энергоносителя, и в координатах Р, δ изображается прямой линией.
При определенных значениях ЭДС генератора Е и напряжения приемной системы U характеристика мощности имеет максимум, который вычисляется по формуле
Иногда эту величину называют «идеальным» пределом мощности простейшей электрической системы. Заданному значению мощности турбины соответствуют две точки пересечения характеристик a и b (рис. 9.2, а), в которых мощности генератора и турбины урав новешивают друг друга.
Рассмотрим режим работы в точке а. Если мощность генерато ра по какой-либо причине изменится на величину ΔР, то и угол δ, следуя синусоидальной зависимости, изменится на Δδ. Из рис. 9.2, а следует, что в точке а положительному приращению мощности соответствует положительное приращение угла.
При изменении мощности генератора равновесие моментов турбины и генератора нарушается. При увеличении мощности ге нератора на валу, связывающем его с турбиной, возникает избыточный тормозящий момент, поскольку тормозящий момент генератора преобладает над вращающим моментом турбины. Под влиянием тормозящего момента ротор генератора начинает замед ляться, что вызывает перемещение ротора и связанного с ним век тора ЭДС Е в сторону уменьшения угла δ (рис. 9.2, б). Необходимо подчеркнуть, что перемещение ротора под действием избыточного
font-size:9.0pt; color:black">Рис. 9.2. К определению критерия статистической устойчивости простейшей системы: а - характеристика мощности; б - отклонение вектора ЭДС от состояния равновесия; в - выпадение из синхронизма; г - механическая интерпретация
момента накладывается на его движение в положительном направлении с синхронной скоростью, которая во много раз выше скоро сти этого перемещения. В итоге в точке а восстанавливается исходный режим работы и, как следует из определения статической устойчивости, этот режим является устойчивым. Такой же вывод можно получить и при уменьшении мощности генератора в точке а. В точке b отрицательному приращению мощности генератора соответствует положительное приращение угла.
При уменьшении мощности генератора на валу возникает ус коряющий избыточный момент, который увеличивает угол d . С ростом угла мощность генератора падает, это увеличивает ускоряющий момент, т. е. возникает лавинообразный процесс, называе мый выпадением из синхронизма. Процесс выпадения из синхронизма и асинхронный режим, в котором в итоге оказывается генератор, характеризуются непрерывным перемещением вектора ЭДС Е относительно напряжения U приемной системы (рис. 9.2, в).
Если в точке b возникнет тормозной избыточный момент (мощность генератора увеличится), то он вызовет перемещение рабочей точки системы турбина - генератор в точку а.
Реферат
Пояснительная записка содержит 21 страницы, 6 таблиц, 14 рисунков,3 источников литературы, в которой подробно расписана методика расчёта, которая использовалась в данной работе.
Объект исследования: система электропередачи.
Цель работы: получить навыки расчёта электромеханических переходных процессов в системе электропередачи, рассчитать предельное снижение напряжения на шинах асинхронного двигателя, оценить статическую и динамическую устойчивость системы.
Введение
Исходные данные
Заключение
Введение
Устойчивость энергосистемы - это способность ее возвращаться в исходное состояние при малых или значительных возмущениях. По аналогии с механической системой установившийся режим энергосистемы можно трактовать как равновесное положение ее.
Параллельная работа генераторов электрических станций, входящих в энергосистему, отличается от работы генераторов на одной станции наличием линий электропередачи, связывающих эти станции. Сопротивления линий электропередачи уменьшают снихронизирующую мощность генераторов и затрудняют их параллельную работу. Кроме того, отклонения от нормального режима работы системы, которые происходят при отключениях, коротких замыканиях, внезапном сбросе или набросе нагрузки, также могут привести к нарушению устойчивости, что является одной из наиболее тяжелых: аварий, приводящей к перерыву электроснабжения потребителей Поэтому изучение проблемы устойчивости очень важно, особенно применительно к линиям электропередачи переменным током. Различают два вида устойчивости: статическую и динамическую.
Статической устойчивостью называют способность системы самостоятельно восстановить исходный режим при малых и медленно происходящих возмущениях, например при постепенном незначительном увеличении или уменьшении нагрузки.
Динамическая устойчивость энергосистемы характеризует способность системы сохранять синхронизм после внезапных и резких изменений параметров режима или при авариях в системе (коротких замыканиях, отключений часта генераторов, линий или трансформаторов). После таких внезапных нарушений нормальной работы в системе возникает переходный процесс, по окончании которого вновь должен наступить установившийся послеаварийный режим работы.
Именно такие внезапные нарушения в работе СЭС приводят к тяжелым экономическим последствия для населения и промышленных объектов.
Современная энергетика уделяет очень большое внимание борьбе с авариями на линиях, короткими замыканиями, большой вклад делает еще на стадии проектировании СЭС городов и предприятий.
Исходные данные
Схема для расчёта представлена на рисунке 1.
Рисунок 1 - Схема системы электропередачи
Исходные данные для расчёта первой и второй задачи принимаем по таблице в соответствии с номером варианта.
Технические данные трансформаторов:
Тип транс форматора,
МВАПределы регулиро
вания, %, кВ
обмоток, %
%ВНТДЦ-250000/110250-11013.8; 15.75; 1810,56402000.5ТДЦ-630000/110630-1102010.59003200.45
Параметры двухцепной воздушной линии электропередачи
Марка провода,
Ом/кмДлина
l , кмU,кВАС-3300.1070.3670.3820.3301.3890.931300110
Рисунок 2 - Схема системы для расчёта предельного снижения напряжения на шинах асинхронного двигателя
Исходные данные для расчёта третьей задачи принимаем ниже по таблице в соответствии с номером варианта.
Технические данные асинхронного электродвигателя
ТипНоминальные данныеПусковые характеристикиP, кВтI, АN, об/мин, %, кг*м2U, кВn0, об/минДАЗО 17-39-8/1050061.574191.00.855.20.652.12886741
Параметры КЛ:
Тип проводаДлина l , кмх0, Ом/кмАПвВ 1*3000,0350,099
Составляем схему замещения системы, которая представлена на рис.1 и рассчитываем индуктивные сопротивления всех элементов:
Рисунок 3 - Схема замещения системы
индуктивное сопротивлении задано,
индуктивное сопротивление трансформаторов:
индуктивное сопротивление ЛЭП:
Все сопротивления схемы замещения приводятся к номинальному напряжению генератора. Сопротивление трансформаторов:
сопротивление ЛЭП:
Определяем суммарное сопротивление системы:
Рассчитываем номинальную реактивную мощность генератора:
Определяем приближённое значение синхронной ЭДС генератора:
Определяем значение коэффициента запаса статической устойчивости:
По данным расчёта строим векторную диаграмму.
Рисунок 4 - Векторная диаграмма
Результаты расчёта заносим в таблицу 3.
Таблица 3
МВт0162312,5442541603,7625603,7541442312,51620
Рисунок 5 - Угловая характеристика мощности
Система является статически устойчивой, так как коэффициент запаса больше 20%. И предел передаваемой мощности генератора в систему достигается при угле? = 900.
Рассчитываем режимы по очереди.
2.1 Расчёт аварийного и послеаварийного режима при однофазном коротком замыкании в точке К-1
1.1 Нормальный режим
1.2 Аварийный режим
Составляем схему замещения системы при однофазном КЗ
Рисунок 6 - Схема замещения для аварийного режима при однофазном КЗ
Суммарное сопротивление КЗ Х? при однофазном коротком замыкании равно сумме сопротивлению обратной последовательностии сопротивлению нулевой последовательности.
Преобразуем схему замещения системы при однофазном КЗ из соединения "звезда" в соединение "треугольник" со сторонами Х1, Х2, Х3.
Сопротивление Х2 и Х3 могут быть отброшены, т.к. поток мощности отдаваемый генератором в сеть не проходит через эти сопротивления.
Рисунок 7 - Преобразованная схема замещения
Определим суммарное сопротивлении системы:
Где X?=X2?+X0? - шунт несимметричного КЗ, который включается между началом и концом схемы прямой и обратной последовательности.
Определяем индуктивное сопротивление нулевой последовательности Х0?:
Определим индуктивное сопротивление обратной последовательности X2?
Определяем сопротивления шунта КЗ X?:
X2?+X0? = 3 +0,097 = 3,097 Ом
Хd?II = 20,2 + 0,1 + 3,5 +0,04 + = 47Ом.
Определяем предел передаваемой мощности генератора в систему:
Изменяя значения угла от 0 до 180 град., рассчитываем соответствующие значения мощности отдаваемой генератором в систему по формуле:
Результаты расчёта заносим в таблицу 4.
Таблица 4
Град0153045607590105120135150165180, МВт081,3157222,3271,9303,3314303,3271,9222,315781,30
1.3 Послеаварийный режим
Составляем схему замещения системы для послеаварийного режима.
Рисунок 8 - Схема замещения для послеаварийного режима при однофазном КЗ
Послеаварийный режим определяется отключением одной цепи ЛЭП, после чего сопротивление изменяется:
Определяем суммарное сопротивлении системы:
Определяем предел передаваемой мощности генератора в систему:
Рассчитываем значение углов:
Тоткл = +
Поскольку линия имеет защиту, то через некоторое время она отключится выключателями. Следовательно, выбираем элегазовый выключатель серии ВГБЭ-35 - 110 с временем отключения = 0,07 с. Также должно быть предусмотрены устройства релейной защиты от КЗ. Выбираем токовое реле РТ-40 с временем уставки = 0,08 с.
0,07 + 0,08 = 0,15 с,
Находим время отключения КЗ:
Тоткл = 0,07 + 0,15 = 0,22 с.
29 ? 0,22, что удовлетворяет условию? Тоткл
Изменяя значения угла от 0 до 180 град., рассчитываем соответствующие значения мощности отдаваемой генератором в систему по формуле:
Таблица 5
Результаты расчёта заносим в таблицу 5.
град0153045607590105120135150165180,
МВт0140270.5382.5468.5522.6541522.6468.5382.5270.51400
Строим в одной координатной плоскости угловые характеристики мощности в нормальном, аварийном и послеаварийном режимах, на графике указываем значение мощности турбины Р0. С учётом рассчитанного значения предельного угла отключения КЗ ?откл на графике строим площади ускорения и торможения.
Рисунок 9 - График угловых характеристик мощностей и площади ускорения и торможения при однофазном КЗ
2.2 Расчёт аварийного и послеаварийного режима при трёхфазном коротком замыкание в точке К-2
2.2.1 Нормальный режим
Расчёт нормального режима проведён в задаче 1.
2.2 Аварийный режим
Составляем схему замещения системы при трёхфазном КЗ
Рисунок 10 - Схема замещения системы при трёхфазном КЗ
При трёхфазном КЗ в точке К-2 взаимное сопротивление схемы становится бесконечно большим, т.к. сопротивление шунта КЗ Х? (3) = 0. При этом характеристика мощности аварийного режима совпадает с осью абсцисс.
2.3 Послеаварийный режим
Схема замещения при трехфазном коротком замыкании и и расчет послеаварийного режима аналогичем послеаварийному режиму, приведенному в п.2.1.3
Рассчитываем значение углов:
Находим предельный угол отключения КЗ?откл:
Рассчитываем предельное время отключения КЗ:
Выбираем соответствующие уставки срабатывания устройств РЗА:
Тоткл = +
Поскольку линия имеет защиту, то через некоторое время она отключится выключателями. Следовательно, выбираем элегазовый выключатель серии
ВГТ - 110 с временем отключения = 0,055 с. Также должны быть предусмотрены устройства релейной защиты от КЗ. Выбираем токовое реле РТ-40 с временем уставки = 0,05 с.
Время действия релейной защиты определяется:
0,005 + 0,05 = 0,055 с,
Находим время отключения КЗ:
Тоткл = 0,055 + 0,055 = 0,11 с.
17 ? 0,11, что удовлетворяет условию? Тоткл
Строим в одной координатной плоскости угловые характеристики мощности в нормальном, аварийном и послеаварийном режимах, на графике указываем значение мощности турбины Р0. С учётом рассчитанного значения предельного угла отключения КЗ?откл на графике строим площади ускорения и торможения.
Рисунок 11 - График угловых характеристик мощностей и площади ускорения и торможения при трёхфазном КЗ
Для определения динамической устойчивости системы при однофазном КЗ необходимо рассмотреть площади ускорение Fуск и торможения Fторм. Условием для динамической устойчивости системы является неравенство: Fуск? Fторм. Невооруженным глазом видно по графику угловой характеристики, что площадь ускорения на порядок больше площади торможения, значит система не является динамически устойчивой. Следовательно, накопленная кинетическая энергия не успевает превратиться в потенциальную, в результате скорость вращения ротора и угол? будут расти и генератор выпадет из синхронизма. Для определения статической устойчивости системы необходимо найти коэффициент запаса. Вычислив коэффициент запаса, можно сделать вывод, что система является статически устойчивой, так как.
Рассчитываем параметры элементов электропередачи и параметры нагрузки, приведённые к базисному напряжению Uб = 6 кВ и базисной мощности:
Sб = SАД ном = ,
Сопротивление линии:
Индуктивное сопротивление рассеяния магнитной цепи двигателя:
Определяем активную мощность потребляемая в исходном режиме двигателя:
Находим активное сопротивление ротора двигателя в исходном режиме (упрощенная схема замещения асинхронного двигателя):
0392 +0,05? = ,
произведём замену на х и получим:
05х2 - х + 0,0392 = 0;
Д = в2 - 4ас = 12 - 4?0,05?0,0392 = 0,99216;
Выбираем наибольший из корней уравнения и получаем:
Определяем реактивную мощность, потребляемую в исходном режиме двигателем:
Определяем напряжение на шинах системы в исходном режиме:
Определяем напряжение на шинах системы, при котором происходит затормаживание двигателя:
Определяем запас статической устойчивости двигателя по напряжению:
Для построения механической характеристики М = f (S) по уравнению
М = , необходимо произвести следующий расчёт:
Определяем номинальную частоту вращения ротора:
ном = n0? (1 - Sном) = 741? (1-0,01) = 734 об/мин.
Находим критическое скольжение:
кр = Sном?(?? +) = 0,01? (2,1 +) = 0,039.
Определяем номинальный и максимальный (критический) моменты двигателя:
Мном = = Н?м,
Мmax = ?? ? Мном = 2,1?6505,3 = 13661, 4 Н?м.
Для построения механической характеристики воспользуемся формулой Клосса:
Задавшись различными значениями скольжения S, найдём соответствующие им значения момента М. Результаты расчёта занесем в таблицу 6.
Таблица 6
SM, Н?м000,0166480,039136610,06124190,08105890,192620,251260,335020,426420,521180,617630,715180,813320,9115011064
По данным таблицы 6 строим график М = f (S):
Рисунок 12 - График механической характеристики асинхронного двигателя
Система является статически устойчивой, так как коэффициент запаса двигателя по напряжению больше 20%
Заключение
После выполнения данной курсовой работы были отработаны и закреплены теоретические знания, приобретенные в течение семестра по расчету различных видов КЗ; проверки системы на статическую и динамическую устойчивать; построения угловых характеристик мощности и механической характеристики асинхронных.
Научился выполнять анализ системы на устойчивость, рассчитывать режимы работы системы до, после, и во время различных видов КЗ.
Можно сделать вывод, что расчет электромеханических переходных процессов занимает одну из значимых позиций по расчету и проектировании различных простых и сложных систем энергоснабжения.
Список используемой литературы
1. Куликов Ю.А. Переходные процессы в электрических системах: Учеб. пособие. - Новосибирск: НГТУ, М.: Мир: ООО "Издательство АСТ", 2008. -
Боровиков В.Н. и др. Электроэнергетические системы и сети - Москва: Метроиздат., 2010. - 356 с.
Аполлонов А.А. Расчет и проектирование релейной защиты и автоматики - С. - Петербург, 2009г. - 159 с.
Репетиторство
Нужна помощь по изучению какой-либы темы?
Наши специалисты проконсультируют или окажут репетиторские услуги по интересующей вас тематике.
Отправь заявку
с указанием темы прямо сейчас, чтобы узнать о возможности получения консультации.
1.1. Понятие статической и динамической устойчивости в электроэнергетических системах
Под устойчивостьюсостояния электрической системы понимается ее способность восстанавливать исходный режим (или достаточно близкий к нему) после воздействия какого-либо возмущения («большого» или «малого»). Процесс нарушения устойчивости в электрических системах всегда связан с ограниченной пропускной способностью ее отдельных элементов - линий связи, трансформаторов и.т.п. Естественно, что при неизменных параметрах электрической системы предел передаваемой мощности зависит от уровней напряжений и потерь передаваемой мощности на сопротивлениях элементов. Нарушения устойчивости в электрических системах происходят в результате воздействия на ее работу возмущающих факторов, которые могут быть «большими» и «малыми». Протекание процесса при этом одинаково и сопровождается в любом случае резким снижением напряжения в узлах системы (возникновением «лавины» напряжения), увеличением тока в ее ветвях, изменением скорости вращения электрических машин. Нарушение устойчивости всегда заканчивается появлением асинхронного хода, связанного с неограниченным изменением скоростей вращения синхронных машин, и часто приводит к «развалу» системы - отключению нагрузки, генераторов станций, к делению системы на несинхронно работающие части. «Малые» возмущения опасны для работы электрических систем в тяжелых режимах, когда по ее элементам протекают потоки мощности, близкие к предельным. Тогда как «большие» возмущения могут вызвать нарушение устойчивости в нормальных режимах. В зависимости от причины, которая привела к нарушению устойчивости, выделяются три се вида: - статическая устойчивость - способность системы сохранять (восстанавливать) исходный (или близкий к нему) режим при действии «малых» возмущений. - динамическая устойчивость - способность системы восстанавливать длительно существующий установившийся режим при «больших» возмущениях. - результирующая устойчивость - способность системы возвращаться в длительно существующий установившийся режим после кратковременного нарушения устойчивости.
Статическая устойчивость синхронного генератора
Оценка статической устойчивости синхронного генератора, включенного на шины энергосистемы (рис.1), может быть выполнена при помощи второго закона Ньютона для вращающегося тела
где M в - вращающий момент на валу энергетического двигателя, кг.м; М с - момент сопротивления (тормозной момент) на валу генератора, кг.м; ω - угловая частота вращения вала агрегата, с -1 ;
Момент инерции, кг.м.с 2 ; GD 2 - маховые массы вращающихся частей, присоединенные к валам энергетического двигателя и генератора, кг.м 2 ; g = 9,81 м/с 2 -ускорение земного притяжения.

1. Схема электропередачи мощности от синхронного генератора в энергосистему и ее схема замещения: Т - турбина; Г - генератор; Т1 - трансформатор подстанции; Л1, Л2 - линии электропередачи; Т2 - трансформатор связи с энергосистемой; ЭС – энергосистема.
Статическая устойчивость синхронного агрегата оценивается при постоянной синхронной частоте вращения, при которой мощности на валу энергетического двигателя и синхронного генератора пропорциональны моментам, а в относительных единицах равны, т. е.
Статическая устойчивость оценивается при относительном движении ротора агрегата, т. е. при перемещении ротора относительно вектора вращающегося электромагнитного поля статора генератора (рис.2), при изменении угла вылета ротора. Скорость его изменения соответствует производной (1.1.2)
При относительном движении ротора генератора уравнение движения (1.1.1) можно представиться в следующем виде:
 (1.1.3)
(1.1.3)

Рис. 2. Принципиальные конструктивные схемы синхронных генераторов: а - неявнополюсный; б - явнополюсный
Это уравнение - уравнение динамического равновесия, ибо при равенстве Р т = Р г угол вылета ротора 0 имеет постоянную величину. Если равенства мощностей нет, то имеет место либо ускорение агрегата при P т > P г , либо замедление при Р т < Р г, т. е. по знаку разности мощностей можно судить о характере движения вала агрегата. Поэтому целесообразно уравнение (1.1.3) использовать в таком виде
 (1.1.4)
(1.1.4)
где ∆Р - избыточная мощность.Характеристика мощности энергетического двигателя в координатах Р, является прямой линией, так как мощность, развиваемая двигателем, не зависит от угла вылета ротора.
Характеристика мощности синхронного генератора в координатах Р, представляется синусоидальной угловой характеристикой (рис. 3), получаемой из векторной диаграммы:
для неявнополюсной машины (турбогенератора)
 (1.1.5)
(1.1.5)
для явнополюсной машины (гидрогенератора)
 (1.1.6)
(1.1.6)
где сопротивления генераторов в продольной и в поперечной осях с учетом сопротивлений схемы замещения (см. рис. 1)

Па рис. 3 показаны характеристики турбины и генератора. Характеристики имеют две точки взаимного пересечения 1 и 2. В соответствии с положением теоретической механики в точках
Статическая устойчивость
Под статической устойчивостью понимается способность энергосистемы сохранять синхронную параллельную работу генераторов при малых возмущениях и медленных изменениях параметров режима.
На рис. 9.2, а показана схема электрической системы, состоящей из электростанции ЭС, линии электропередачи и приемной энергосистемы бесконечно большой мощности. Известно, что электрическая мощность Р, развиваемая электростанцией и потребляемая нагрузкой энергосистемы, равна:
где Е т - ЭДС генераторов электростанции; U c - напряжение энергосистемы; Хрез - результирующее сопротивление генераторов электростанции, линии электропередачи и энергосистемы.
Если ЭДС генераторов Е г, напряжения системы U c и Х 9а неизменны, то электрическая мощность, передаваемая электростанцией в энергосистему, зависит от угла между векторами £ г и 0 с (рис. 9.2,6). Эта зависимость имеет синусоидальный характер, она получила название угловой характеристики электропередачи (рис. 9.2, в).
Максимальное значение мощности, которая может быть передана в энергосистему, называется пределом статической устойчивости:

Мощность турбины не зависит от угла в и определяется только количеством энергоносителя, поступающего в турбину.
Условию (9.3) соответствуют точки / я 2 на рис. 9.2, в. Точка I является точкой устойчивого равновесия, а точка 2 - неустойчивого равновесия. Область устойчивой работы определяется диапазоном углов б от 0 до 90 е. В области углов, больших 90°, устойчивая параллельная работа невозможна. Работа на предельной мощности, соответствующей углу 90°, не производится, так как малые возмущения, всегда имеющиеся в энергосистеме колебания нагрузки, могут вызвать переход в -неустойчивую область и нарушение синхронизма. Максимальное допустимое значение передаваемой мощности принимается меньшим предела статической устойчивости. Запас оценивается коэффициентом запаса статической устойчивости, %:
Запас статической устойчивости для электропередачи в нормальном режиме должен составлять не менее 20%, а в кратковременном послеаварийном режиме (до вмешательства персонала в регулировании режима) - не менее 8 % .
Динамическая устойчивость
Под динамической устойчивостью понимается способность энергосистемы сохранять синхронную параллельную работу генераторов при значительных внезапных.возмущениях, возникающих в энергосистеме (КЗ, аварийное отключение генераторов, линий, трансформаторов) . Для оценки динамической устойчивости применяется метод площадей . В качестве примера рассмотрим режим работы двухцепной электропередачи, связывающей электростанцию с энергосистемой, при КЗ на одной из линий с отключением поврежденной линии и ее успешным АПВ (рис. 9.3, а).
Исходный режим электропередачи характеризуется точкой /, расположенной на угловой характеристике /, которая соответствует исходной схеме электропередачи (рис. 9.3,6). При КЗ в точке К1 на линии W2 угловая характеристика электропередачи занимает положение //. Снижение амплитуды характеристики // вызвано значительным увеличением результирующего сопротивления Х ре, между точками приложения Е г и U a . В момент КЗ происходит. сброс электрической" мощности на величину АР за счет снижения напряжения на шинах станции (точка 2 на рис. 9.3,6). Сброс электрической мощности зависит от вида КЗ и его места. В предельном случае при трехфазном КЗ на шинах станции происходит сброс мощности до нуля. Под действием избытка механической мощности турбин над электрической мощностью роторы генераторов станции начинают ускоряться, а угол 6" увеличивается. Процесс изменения мощности идет по характеристике //. Точка 3 соответствует моменту отключения поврежденной линии с двух сторон устройствами релейной защиты РЗ. После отключения линии режим электропередачи характеризуется точкой 4, расположенной на характеристи-

ке, которая соответствует схеме электропередачи с одной отключенной линией. За время изменения угла от 6i до бз роторы генераторов станции приобретают дополнительную кинетическую энергию. Эта энергия пропорциональна площади, ограниченной линией Р т, характеристикой // и ординатами в точках 1 п 3. Эта площадь получила название площадки ускорения S y . В точке 4 начинается процесс торможения роторов, так как электрическая мощность больше мощности турбин. Но процесс торможения происходит с увеличением угла в. Увеличение угла в будет продолжаться до тех пор, пока вся запасенная кинетическая энергия не перейдет в потенциальную. Потенциальная энергия пропорциональна площади, ограниченной линией Р т и угловыми характеристиками после-аварийного режима. Эта площадь получила название площадки торможения S T . В точке 5 по истечении некоторой паузы после отключения линии W2 срабатывает устройство АПВ (предполагается использование трехфазного быстродействующего АПВ с малой паузой). При успешном АПВ процесс увеличения угла будет продолжаться по характеристике Z, 1 соответствующей исходной схеме электропередачи. Увеличение угла прекратится в точке 7, которая характеризуется равенством площадок S y и S T . В точке 7 переходный процесс не останавливается: вследствие того что электрическая мощность превышает мощность турбин, будет продолжаться процесс торможения по характеристике /, но только с уменьшением угла. Процесс установится в точке /после нескольких колебаний около этой точки. Характер изменения угла б во времени показан на рис. 9.3, в.
С целью упрощения анализа мощность турбин Р т во время переходного процесса принята неизменной. В действительности она несколько меняется вследствие действия регуляторов частоты вращения турбин.
Таким образом, анализ показал, что в условиях данного примера сохраняется устойчивость параллельной работы. Необходимым условием динамической устойчивости является выполнение условий статической устойчивости в послеаварийном режиме. В рассмотренном примере это условие выполняется, так как мощность турбин не превышает предела статической устойчивости.
Устойчивость параллельной работы была бы нарушена, если бы в переходном процессе угол 6 перешел значение, соответствующее точке 8. Точка 8 ограничивает справа максимальную площадку торможения. Угол, соответствующий точке 8, получил название критического 6 KP . При переходе этой границы наблюдается лавинное увеличение угла б, т. е. выпадение генераторов из синхронизма.
Запас динамической устойчивости оценивается коэффициентом, равным отношению максимально возможной площадки торможения к площадке ускорения:
При £ 3 ,дин>1 режим устойчив, при А 3 ,дии<1 происходит нарушение устойчивости. В случае неуспешного АПВ (включение линии на неустранившееся КЗ) процесс из точки 5 перейдет на характеристику //. Нетрудно убедиться, что в условиях данного примера устойчивость после повторного КЗ и последующего отключения линии не сохраняется.
Отчетность за сотрудников